title: “CUDA’s New Rust Compiler Doesn’t Just Rewrite Code, It Rewrites the Rulebook”
For over a decade, GPU programming has meant one thing: writing C++. Or more precisely, writing C++ and then praying your memory bugs don’t crash the entire cluster. NVIDIA’s cuda-oxide, an experimental Rust-to-CUDA compiler backend that just landed, isn’t a marginal improvement. It’s a fundamental challenge to that entire paradigm.

This isn’t just another interoperability layer or FFI wrapper. It’s a custom rustc codegen backend that compiles Rust kernels directly to PTX (Parallel Thread Execution) assembly. No external DSL, no foreign function bindings, none of the C++ baggage. Just a single cargo oxide run command that spits out a host binary and a .ptx file.
Think about that for a second. You write generic, idiomatic Rust, closures, structs, pattern matching, and it lands directly on GPU silicon. The same compilation pipeline that enforces Rust’s legendary memory safety now runs over your CUDA kernels. It’s a tectonic shift disguised as a compiler backend release.
The Compilation Pipeline: From Safe Rust to Raw PTX
The architectural play here is fascinating. cuda-oxide isn’t just slapping lipstick on the CUDA pig. It’s rebuilding the pipework.
Rust Source → rustc frontend → rustc_public (Stable MIR) → dialect-mir →
mem2reg → dialect-llvm → LLVM IR (.ll) → PTX (.ptx)
That middle bit, using rustc_public, is crucial. Raw Rust MIR changes nightly, because compiler internals should. But rustc_public is Rust’s official, versioned, stable API over those internals. This is NVIDIA Labs saying they are committed to the Rust ecosystem, not just bolting on a side project. They chose Pliron, a Rust-native MLIR-like IR framework, as the middle stage precisely so the whole compiler builds with cargo. No C++ toolchain, no CMake, no fighting tablegen for three days.
Canonical vecadd Example
use cuda_device::{cuda_module, kernel, thread, DisjointSlice};
use cuda_core::{CudaContext, DeviceBuffer, LaunchConfig};
#[cuda_module]
mod kernels {
use super::*;
#[kernel]
fn vecadd(a: &[f32], b: &[f32], mut c: DisjointSlice<f32>) {
let idx = thread::index_1d();
let i = idx.get();
if let Some(c_elem) = c.get_mut(idx) {
*c_elem = a[i] + b[i];
}
}
}
That #[kernel] annotation marks a function for the GPU pipeline. Notice anything missing? No unsafe. NVIDIA refers to this as “Tier 1 Safety”, race-free by construction. The DisjointSlice<T>::get_mut() method only accepts a ThreadIndex, an opaque newtype created from the hardware’s threadIdx, blockIdx, blockDim registers. Each thread gets a unique index, so writes are inherently disjoint. No more worrying about data races in your kernel launch parameters.
But the safety model is properly tiered. Tier 2 introduces scoped unsafe blocks for shared memory, warp intrinsics, and atomics, explicit contracts for when you’re stepping outside Rust’s normal guarantees. Tier 3 is raw hardware intrinsics for Tensor Memory Accelerator (TMA), WGMMA, and tcgen05 operations. It’s a layered approach that respects both the programmer’s intent and GPU reality.
A Subtle, Non-Optional Revolution
The genius is in what it subtly prohibits. Consider the JumpThreading MIR optimization. On a CPU, it’s perfectly safe to duplicate function calls into both branches of an if statement for performance. On a GPU, that’s a cardinal sin. All threads in a block must converge at the same bar.sync instruction. Duplicate barriers across branches? Converge? Not happening.
cuda-oxide disables JumpThreading for device code and marks sync primitives as convergent in the emitted LLVM IR so LLVM won’t move them. This isn’t optional. It’s baked into the compiler’s understanding of the target architecture.
This extends to zero-cost cross-compilation of dependencies. Device code from library dependencies is compiled lazily. The backend reads Stable MIR from .rlib metadata on demand, compiling only the functions your kernel actually calls. Your #[kernel] marked code triggers compilation of the necessary device-side functions from your imported libraries, no separate device libraries required.
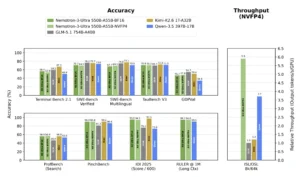
Performance Achievement:
- 868 TFLOPS on a B200
- Approximately 58% of cuBLAS’s “speed of light” performance
- Uses
cta_group::2, CLC (Cluster-Level Control) - Implements 4-stage pipeline
However, there are sharp edges. The documentation very clearly states that index_2d(stride) is currently unsound in the 0.x release. If threads in the same kernel use different stride values, two threads can get &mut T to the same element with no unsafe in sight. The temporary fix? Bind stride to a single let binding and reuse it at every call site.
The Asynchronous Execution Revolution You Didn’t See Coming
Async GPU Execution
NVIDIA sneaks in something arguably more profound than kernel safety: async GPU execution.
DeviceOperation
A lazy, composable graph of GPU work that can be scheduled across stream pools.
Structured Concurrency
Foundational shift towards structured concurrency on the GPU.
let op: DeviceOperation<_> = module
.vecadd_async(LaunchConfig::for_num_elems(1024), &a, &b, &mut c)?;
op.sync()?, // or op.await?
Consider modern distributed AI systems. You’re shuffling data between GPUs, overlapping compute with communication, managing complex task graphs. Now you can write this logic in idiomatic Rust async/await, with the borrow checker ensuring you don’t have invalid memory accesses across asynchronous boundaries. This changes the game for frameworks that manage optimizing inference speed on consumer GPU hardware, where every microsecond of kernel latency and synchronization overhead matters.
Who’s This For? Who’s It Threatening?
Immediate Beneficiaries
The immediate beneficiaries are teams building safety-critical GPU applications, think autonomous systems, medical imaging, financial modeling. The guarantee that your kernel cannot have certain categories of memory bugs moves this from “expert-only” territory to something you could plausibly put in a regulatory document.
Triton Competition
It also directly competes with Triton’s niche, DSLs that generate CUDA kernels. Triton gave you high-level abstractions but at a cost: you’re now in Triton-land, not Rust-land. cuda-oxide says: stay in Rust-land. Enjoy generic functions, closures with captures (yes, closures!), user-defined structs and enums, and pattern matching, all compiling directly to PTX.
Ecosystem Positioning
- rust-cuda: Bringing Rust to NVIDIA GPUs with Rust ergonomics
- cuda-oxide: Bringing CUDA into Rust with kernel authoring focus
- Complementary: Both projects working in coordination
The ecosystem positioning is telling. The team notes they’ve been “coordinating with rust-cuda maintainers” and considers the two projects complementary. rust-cuda focuses on “bringing Rust to NVIDIA GPUs” with Rust ergonomics like async/.await, parts of the standard library running on-device, and a Rust-first programming model. cuda-oxide’s stated design center is “bringing CUDA into Rust”, kernel authoring, device intrinsics, the SIMT execution model, and the CUDA programming model expressed natively.
The documentation states bluntly: LLVM 21+ with NVPTX support is required. Why? Simple kernels might work on LLVM 20, but Tensor Memory Accelerator (TMA), tcgen05, and WGMMA intrinsics require it. Targeting Hopper or Blackwell architectures is non-negotiable. The external llc binary (LLVM static compiler with NVPTX backend) is the only non-Rust stage, everything else, from Rust MIR through Pliron dialects to LLVM IR generation, is pure Rust.
Practical Implications and Pain Points
System Requirements
- Rust nightly (
nightly-2026-04-03) withrust-srcandrustc-dev - CUDA Toolkit (12.x+)
clang-21orlibclang-common-21-dev(not justlibclang1-*runtime)- LLVM 21+ with NVPTX backend (
llcmust be in PATH) - Linux (tested on Ubuntu 24.04)
Yes, that’s right. You need the full Clang dev headers because cuda-bindings uses bindgen against cuda.h at build time. A bare runtime package gives you the cryptic 'stddef.h' file not found. cargo oxide doctor catches this upfront, a nice touch.
The CUDA_OXIDE_LLC environment variable pins which llc binary to use, preferring llc-22 then llc-21. The build output is two files: target/debug/vecadd (host binary) and target/debug/vecadd.ptx (device code). The host binary loads the PTX via the CUDA driver at runtime.
The Unspoken Hardware Strategy
There’s a quiet, revolutionary statement buried in the architecture. By rebuilding the entire CUDA compilation pipeline in Rust, targeting Stable MIR, building on Pliron, NVIDIA is future-proofing against their own hardware evolution. When Blackwell’s next tensor core iteration ships, when Hopper’s memory model gets refined, the compiler team can adapt the dialect-nvvm Pliron IR layer without rewriting the entire llvm backend. They own the intermediate representation.
This creates a clean separation between Rust language semantics (dialect-mir), generic LLVM IR (dialect-llvm), and NVIDIA-specific hardware intrinsics (dialect-nvvm). Want to add support for a hypothetical new type of GPU memory? Extend the dialect. Want to experiment with different optimization passes for AI workloads? Add them in the mem2reg-to-dialect-llvm stage.
Consider the project’s handling of legacy driver support for older NVIDIA architectures. While cuda-oxide requires LLVM 21 for modern tensor cores, the differentiation is purely at the backend. The frontend, your Rust kernel code, remains unchanged. The same safety guarantees, the same abstractions, compile to whatever PTX version your llc supports.
The Existential Threat to CUDA C++
Here’s the uncomfortable truth NVIDIA’s labs are dancing around: CUDA C++’s value proposition has been “performance at any cost.” The five-page C++ spec footnotes about memory model, the “it’s undefined behavior but it works on our hardware” pragmas, the sheer cognitive load of writing correct GPU code.
Rust’s value proposition is “correctness, performance, choose two” emerging as “correctness and performance.”
The Trade-off Has Evaporated
- cuda-oxide: 58% of cuBLAS performance WITH memory safety
- Traditional CUDA C++: Full performance WITH memory risks
- Result: Performance no longer shields C++ alone
This matters tremendously for system architecture. GPU kernels become something you can trust, not just something you test heavily. Distributed systems that move data between GPUs can now rely on Rust’s ownership system to prevent entire classes of data races and memory corruption bugs that currently require extensive cross-node validation. Rust’s trait system enables generic kernels that work across data types while maintaining performance.
The project’s 46 examples, from vecadd to gemm_sol to tcgen05 targeting Blackwell tensor cores, aren’t just demos. They’re a proof of concept for a future where AI infrastructure, HPC, and safety-critical systems share the same codebase, the same abstractions, and the same compiler-enforced guarantees. This is the kind of fundamental infrastructure work that enables new paradigms, like exploring alternatives to native runtime environments like JavaScript at the systems level.
The Bottom Line
NVIDIA’s cuda-oxide release is a three-part message:
- Architectural: You can have safety and performance on GPUs, and the compiler should enforce it.
- Strategic: NVIDIA is serious about Rust as a first-class language for their hardware stack.
- Political: The era of “just write C++” is ending, whether the C++ committee likes it or not.
What This Means for Developers
- The project is alpha – expect bugs and API breakage
- The direction is unmistakable
- GPU programming accessible to Rust developers
- Safety guarantees landed on 400 TFLOPS of silicon
For teams at the frontier, building safety-critical autonomous systems, distributed AI training clusters, or financial modeling platforms, this is a seismic shift. Your GPU kernels can now benefit from the same memory safety guarantees that make Rust so attractive for systems programming. The trade-off between performance and safety just evaporated.
The final implication is perhaps the most profound: NVIDIA is building the tooling that could eventually let them deprecate CUDA C++ in favor of something safer, without sacrificing performance. That project starts with an experimental Rust-to-CUDA compiler that compiles SIMT GPU kernels directly to PTX, and ends with a complete rewrite of how we think about GPU compute. The revolution isn’t coming. It’s already compiling your vector addition kernel.