Sparky Doesn’t Call Home: A Suitcase Robot Running Gemma 4 E4B Entirely Offline on Jetson Orin NX
Most robotics projects treat internet connectivity as an axiom, offload vision to cloud APIs, stream telemetry to servers, and accept that a dropped WiFi link means a lobotomized machine. Sparky, a fully autonomous suitcase robot built around a Jetson Orin NX SUPER 16GB, rejects that premise entirely. It runs Google’s Gemma 4 E4B locally with cached time-to-first-token around 200 milliseconds, ingests data from over 30 sensors directly into its prompt context, and operates with no WiFi, Bluetooth, or cellular interfaces at all. This post tears down the hardware configuration, the cache-centric prompt engineering that makes interactive latency possible, and the multimodal voice-to-vision pipeline that gives Sparky personality without ever touching a network.
The Offline Rebellion
Let’s get one thing straight: “edge AI” has become a meaningless marketing sticker. Most so-called edge setups are just cloud AI with extra steps, local preprocessing that still phones home for the actual thinking. That’s what makes Sparky, the creation of a developer who posted the hardware breakdown on Reddit, genuinely annoying to the industry. It doesn’t have a network interface. No WiFi. No Bluetooth. No cellular fallback. If you want to reconfigure it, you use a physical button row, a joystick, and an analog encoder knob like it’s 1989.
Built from an Elecrow Jetson AI starter kit, a sensor-packed suitcase with a screen, the project was transformed from a training platform into a conversational, perceptive robot. The hardware community’s reaction was immediate praise for the industrial aesthetic, but the real juice is under the hood.
Why the Jetson Orin NX SUPER?
The Jetson Orin NX SUPER 16GB sits in a sweet spot that Nvidia’s product stack often obscures. With 157 TOPS of AI compute, it delivers performance close to the AGX Orin while staying lighter, cooler, and far more embeddable. For mobile robots, drones, and anything that actually has to move under its own power, the Orin NX is the grim reaper of the “just use AGX” argument. It doesn’t need a server rack, it needs a battery.
Many commercial robotics companies have already migrated from Nano and Xavier NX to Orin NX for exactly this reason: it’s the workhorse tier for productized bots that need local medium-sized LLM inference without the thermal and power penalties of industrial cards.
Gemma 4 E4B: The Actual Brain
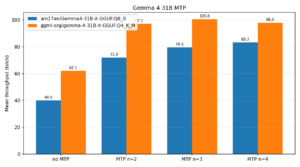
Sparky’s cognitive core is Gemma 4 E4B running at Q4_K_M quantization via llama.cpp, with a q8_0 KV cache and flash attention enabled. If that sounds like a mouthful, here’s the translation: a ~4-billion parameter effective model with a 128K context window, multimodal input capabilities, and an Apache 2.0 license, squeezed into roughly 3 GB of VRAM.
The E4B variant isn’t a pruned afterthought. It’s purpose-built for edge deployment, using Per-Layer Embeddings (PLE) to give each transformer layer richer context without exploding parameter count. Sampler defaults pulled straight from the model card keep generation predictable, and the model’s native system role support means you don’t have to duct-tape conversation state into a custom format.
On Sparky, it sustains 14 tokens per second with a cached time-to-first-token (TTFT) around 200 ms. The practical 12K context window used in this build is conservative compared to Gemma 4’s 128K ceiling, but it’s plenty for a rolling conversation laced with sensor telemetry and visual snippets.
Cache Stability is the Entire Game
The single biggest performance win in Sparky’s stack wasn’t quantization or flash attention. It was prompt structure.
When the project started, dynamic sensor data lived in the system prompt. Every turn, the system block changed, which obliterated llama.cpp’s prefix cache and sent TTFT into multi-second purgatory. The fix was deceptively simple: move the volatile stuff out.
The engineered prompt now looks conceptually like this:
- System Block (static): Persona definition and available tools. Never changes between turns.
- History (static prefix): Prior conversation turns. Identical sequence gets prefix-matched.
- Latest User Turn (dynamic suffix): Append volatile vision descriptions and natural-language sensor readings here.
By keeping the system block and history stable, the KV cache for the entire prefix is reused. The only new computation is the appended user message with fresh sensor data. That dropped cached TTFT from multiple seconds down to roughly 200 ms.
This is the kind of optimization that doesn’t show up in benchmark leaderboards but makes the difference between a robot that stutters and one that banters. If you want to see how extreme real-time inference constraints at the edge in a different domain play out, the same principle applies, latency hides in cache invalidation, not just FLOPs.
Fusing 30+ Sensors into Natural Language
Sparky doesn’t publish ROS topics or dump JSON blobs into the prompt. Instead, data from over 30 sensors is folded into the latest user turn as natural language every single cycle. Think of it as the robot narrating its own physical state directly to the language model.
There’s something subtly brilliant about this. Rather than building separate perception middleware, the LLM itself becomes the integration layer. Temperature, proximity, motion, orientation, it all becomes part of the conversational substrate.
Vision and OCR are now native capabilities of Gemma 4 on the E-series models, which meant Sparky could kill the separate BLIP subprocess entirely. That’s one less process to manage, one less memory fragmentation event, and one less pipeline that could drift out of sync. Modern world models that could inform spatial understanding in autonomous robotics are pushing this idea even further, but Sparky demonstrates that native multimodal LLM features already eliminate entire classes of legacy CV middleware. For robots needing richer spatial grounding, emerging 3D world modeling techniques applicable to robot perception beyond simple vision may eventually complement this stack.
Talk, Listen, and Make Faces
Conversational agency isn’t just text. Sparky’s sensorium extends to speech and expression:
- STT: SenseVoiceSmall handles speech-to-text locally.
- TTS: Piper generates voice output, synchronized to a 43 Hz mouth animation.
- Face: A PixiJS-rendered face on the lid display gives visual feedback.
The result is a robot that reads, reacts, and lip-syncs without a single packet ever leaving the device. While Piper handles Sparky’s current voice needs, the broader race for low-latency, on-device speech synthesis is producing pipelines that make cloud TTS look antiquated by comparison.
Physical Control in a Wireless-Free Stack
Configuration happens through physical hardware: buttons, a joystick, and an analog encoder. There’s no ssh, no OTA updates, no Bluetooth provisioning dance. In an era where even refrigerators try to join your WiFi, this is a deliberate regression that feels like a superpower.
The choice to yank out all radios isn’t just a security flex, it’s a reliability statement. Network partitions don’t exist when there’s no network. The fully offline inference philosophy isn’t limited to robots, it’s spreading across browsers and personal devices, but Sparky ships the most literal interpretation yet: a mobile brain that cannot phone home even if it wanted to.
The Benchmark Reality Check
How does this setup compare? Gemma 4 E4B punches well above its weight class for its memory footprint. According to collected benchmarks, it hits 69.4% on MMLU Pro reasoning tasks and 52% on LiveCodeBench v6, all while consuming roughly 3 GB of VRAM. Compare that to Llama 3.1 8B, which demands an estimated 8–10 GB of VRAM for similar-tier work and lacks native multimodal input.
| Model | Effective Params | Context Window | Typical VRAM | Native Multimodal |
|---|---|---|---|---|
| Gemma 4 E4B | ~4B | 128K | ~3 GB | Yes |
| Llama 3.1 8B | 8B | 128K | ~8–10 GB | Text-primary |
| Qwen2.5 7B | 7B | 33K | ~4 GB | Limited variants |
| Mistral 7B | 7.3B | 8K–32K | ~4 GB | No |
On a Raspberry Pi 5, the smaller Gemma 4 E2B manages 133 tok/s prefill and 7.6 tok/s decode, proof that the architecture scales down to ARM boards. But Sparky’s Jetson Orin NX SUPER 16GB gives the E4B room to stretch its legs without the thermal drama of x86 workstations.
For developers obsessed with parameter counts, it’s worth remembering that GPU-constrained local inference often outperforms massive parameter models when the task is bounded and the deployment target is real hardware with a battery and a budget.
What You Should Steal for Your Own Build
Sparky isn’t a product, it’s a provocation. Here’s what to copy:
- Guard your prefix cache like your latency depends on it (because it does).
Never put dynamic data in the system prompt. Keep persona and tooling static at the top. Append volatile observations to the user turn. This one trick turned a multi-second TTFT into a ~200 ms interaction. - Let the LLM absorb the sensors.
You don’t need a complex ROS-to-JSON-to-pipeline architecture if your model can ingest natural language descriptions of physical state. Thirty sensors in prose beats ten sensors in rigid schema when the goal is flexible, contextual behavior. - Kill subprocesses that the model can natively handle.
Gemma 4’s built-in vision and OCR replaced a separate BLIP process. That’s fewer IPC headaches, less memory thrashing, and fewer moving parts to debug in the field. - Size your compute for the mission, not the benchmark.
The Orin NX SUPER 16GB wasn’t chosen because it tops every leaderboard. It was chosen because it delivers 157 TOPS in a form factor that fits inside luggage. Tradeoffs are the entire point of embedded AI.
Final Thought
Cloud AI has trained us to accept latency, subscription pricing, and data exfiltration as unavoidable costs of intelligence. Sparky suggests otherwise. By marrying a Jetson Orin NX with a quantized Gemma 4 E4B and aggressively engineering the prompt for cache reuse, the builder achieved a conversational, multimodal, physically aware robot that never needs a network handshake.
The next time someone tells you that real robotics requires a round-trip to AWS, point them to a suitcase running offline at 14 tok/s, and tell them it has opinions.